Assistant Professor Nathir Rawashdeh, Applied Computing department, along with Mechatronics graduate students Dunstan Dsouza ’23 and Nader Abu Al Rub, has developed an open-source MATLAB script to visualize road driving data from the Boreas road dataset.
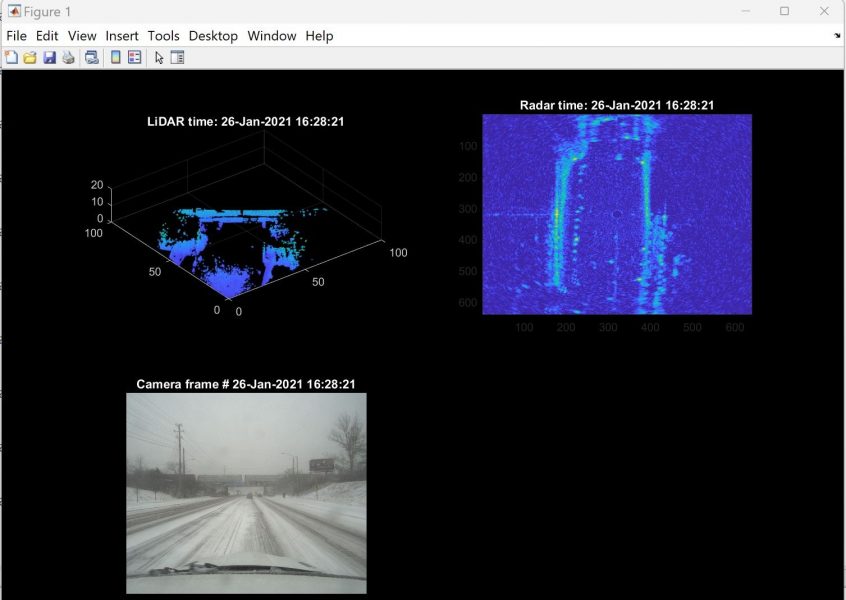
This MATLAB code reads LiDAR, RADAR, and camera frames from the BOREAS road driving dataset and displays them concurrently, even though they have different frame rates. The code can be used to analyze multi-modal driving data of autonomous driving using MATLAB functions, especially in various road weather conditions. The code is available on GitHub.
An explanatory report is available on ResearchGate. The report abstract is below.
This study presents an alternative approach to accessing the BOREAS dataset by utilizing MATLAB’s built-in functions. Recently, one of the most intriguing research areas has been vehicle perception and simultaneous localization and mapping (SLAM) for different weather conditions. To simplify the process of opening the dataset in a toolbox, we have developed this project to assist researchers. Now, instead of concentrating on how to open the dataset in MATLAB, researchers can concentrate on their main project work. MATLAB has impressive functionalities for manipulating data in an offline setting. In this work, we have used inbuilt commands to open the BOREAS Dataset in MATLAB and inspect the various LIDAR, RADAR, and Camera datasets for future applications. The data can be used in real and practical experiments in the field of autonomous driving. This thesis is divided into two parts: (i) to open the LIDAR, RADAR, and Camera datasets with individual plots, and (ii) to open the LIDAR, RADAR, and Camera datasets with concurrent plots. These datasets were obtained from the Boreas: A Multi-Season Autonomous Driving Dataset.
Rawashdeh is a member of the Institute of Computing and Cybnersystems’s (ICC) Center for Data Sciences (DataS).
The Boreas road dataset and the associated benchmarks are intended to support odometry, metric localization, and 3D object detection for lidar, radar, and vision. This dataset features repeated traversals over a long period and multiple weather conditions. These changing conditions may be used to benchmark long-term localization capabilities of different sensors or the robustness of various sensor types to adverse weather.