Jeremy Bos (ECE) was quoted and PhD student Zach Jeffries (electrical engineering) and Akhil Kurup ’22 (PhD, computer engineering) were mentioned by SPIE, Green Car Congress, Tech Xplore, Bioengineering.org and SCIENMAG in a story about a three-year effort to develop tests and performance standards for lidars used in autonomous vehicles and advanced driver assistance systems.
Bos led the testing through its first year, with Jeffries’ assistance. The team’s findings are detailed in an open-access paper published this month in Optical Engineering.
Zach D. Jeffries, Jeremy P. Bos, Paul F. McManamon, Charles Kershner, Akhil M. Kurup
Optical Engineering, Vol. 62, Issue 3, 031211 (January 2023). https://doi.org/10.1117/1.OE.62.3.031211
Extract
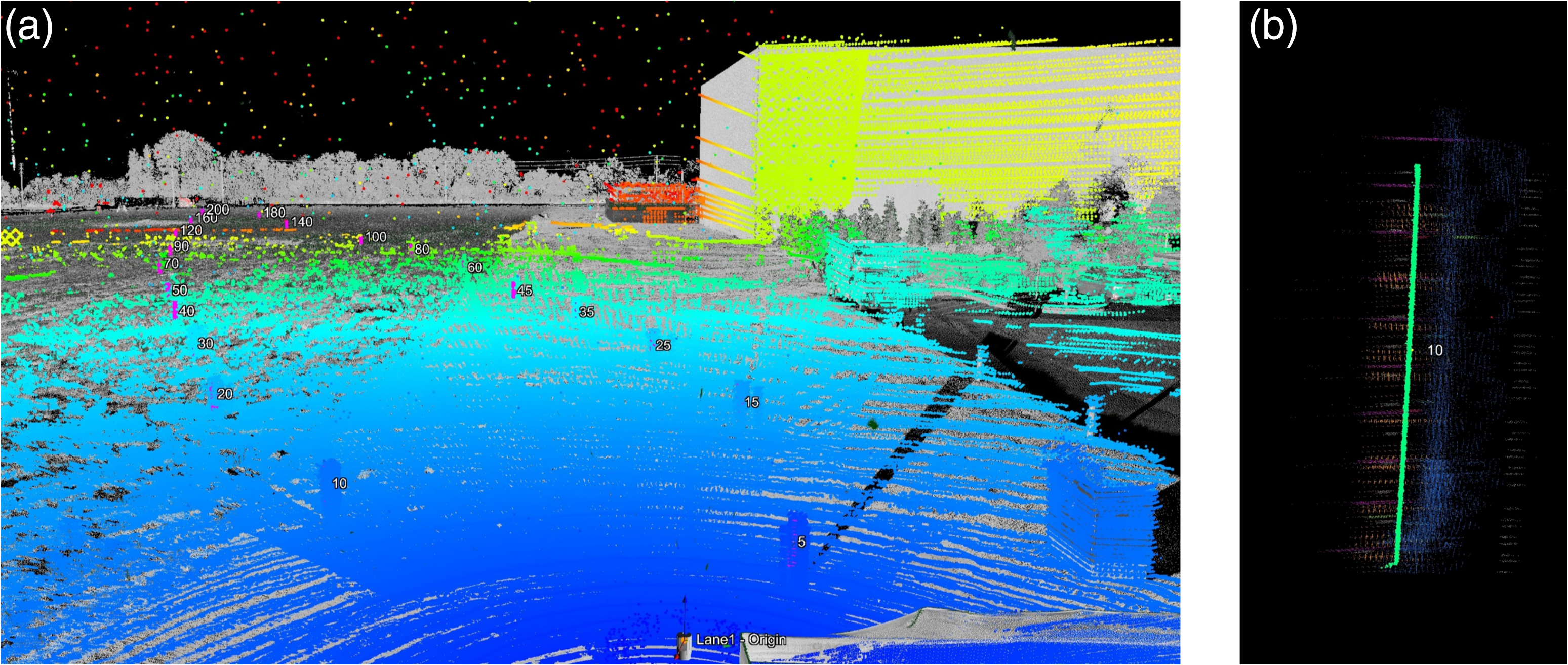
This paper describes the initial results from the first of 3 years of planned testing aimed at developing methods, metrics, and targets necessary to develop standardized tests for these instruments. Here, we evaluate range error accuracy and precision for eight automotive grade lidars; a survey grade lidar is used as a reference. These lidars are tasked with detecting a static, child-sized, target at ranges between 5 and 200 m.
Our purpose in this work is to motivate the development of test standards in this area and highlight variations in performance between lidars when stated specifications are similar.
Proposed additions to the testing include more complex targets, dynamic targets, placing corner cubes, or identical lidars on the test range, and weather effects.